SpaceBok (2018 - 2021)
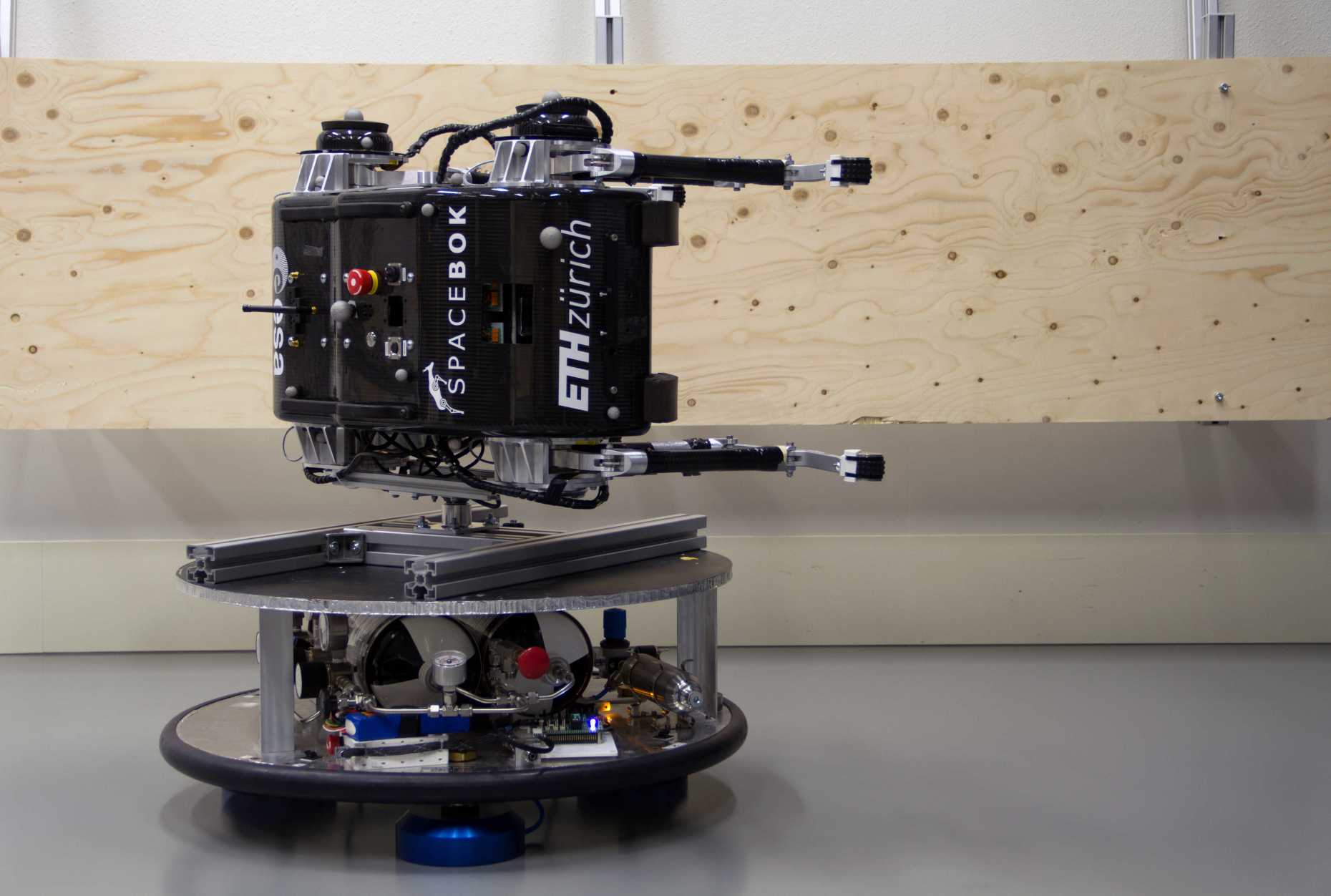
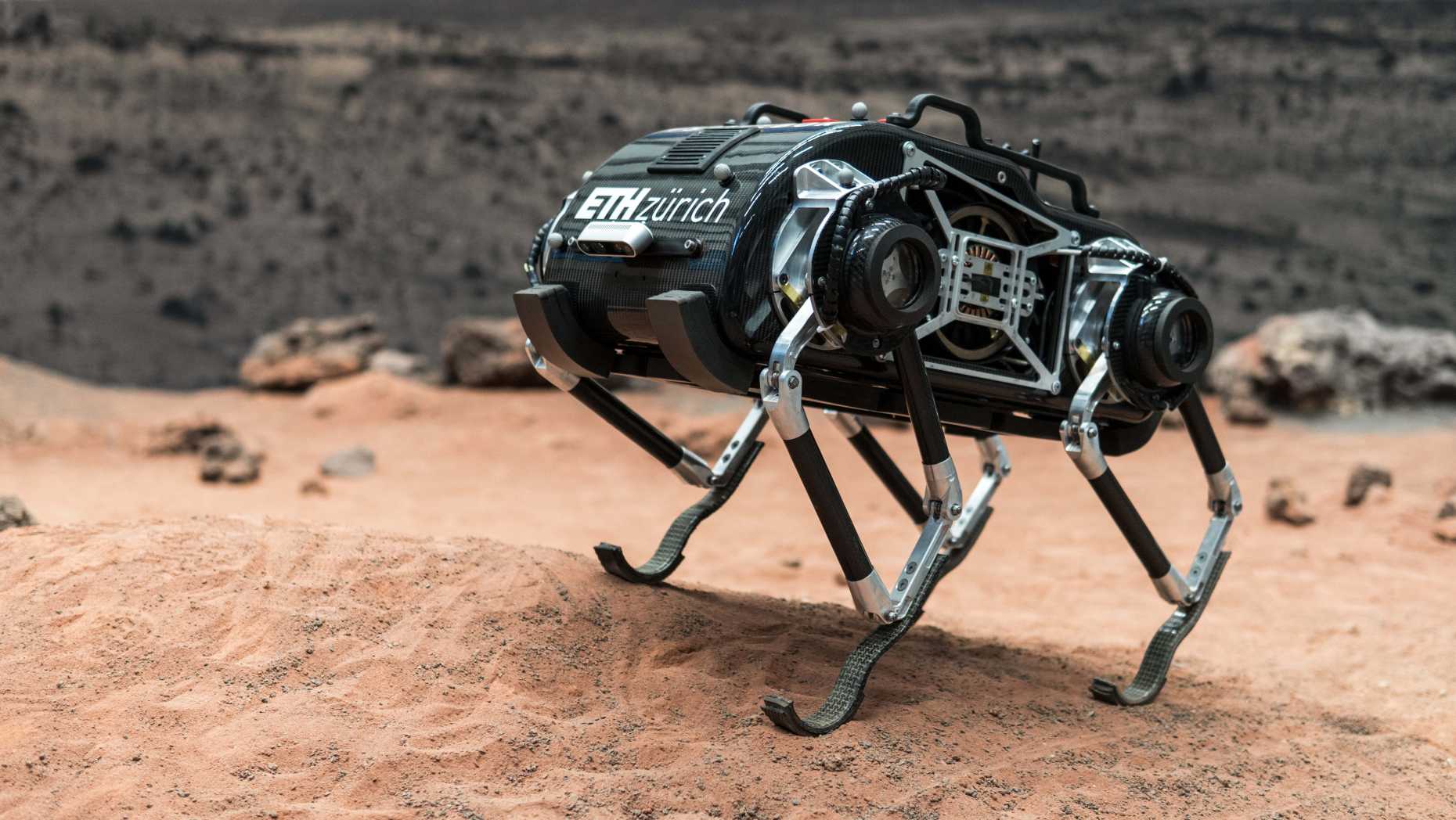
We developed the quadrupedal robot SpaceBok to research dynamic legged locomotion for space exploration. The robot is not space-graded but served as a technology platform for multiple experiments related to surface mobility. The system's modularity allowed hardware changes for several experiments, such as feet for granular soil or a reaction wheel for in-flight attitude control.
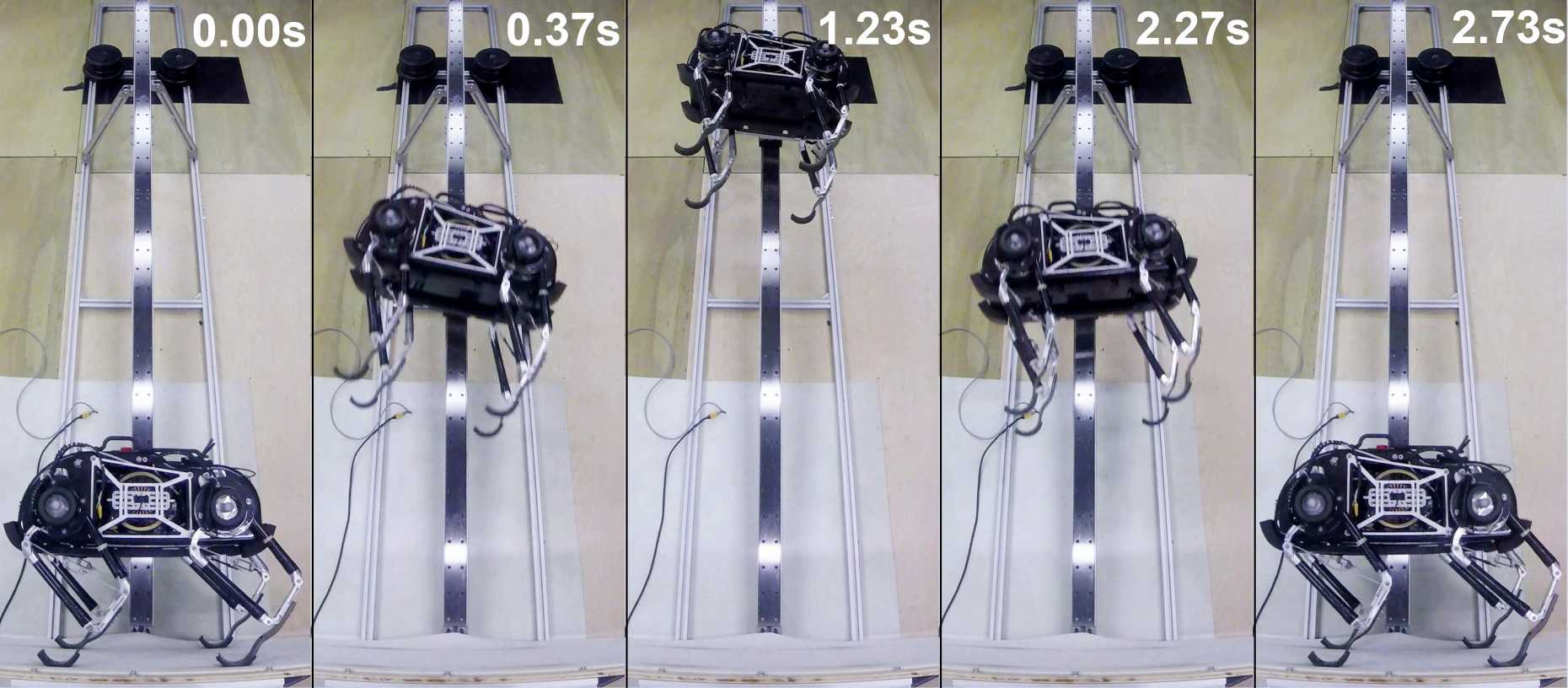
Compared to other quadruped robots, SpaceBok's development focused on lightweight design and a kinematic chain for the leg that allows the actuators to work together to perform explosive (jumping-) maneuvers. Each leg has two Degrees of Freedom, which enables hip flexion/extension and knee flexion/extension. We omitted Hip abduction/deduction to save weight and decrease complexity. The hip height of the robot is 500mm, and the platform weighs 22kg.