Design of adaptive robots
Adaptive shape-changing legged robots
Quadruped robots are proliferating in industrial environments where they carry sensor suites and serve as autonomous inspection platforms. However, their fixed physical hardware, designed primarily for nominal locomotion in structured contexts, limits their ability to interact adaptively with their environment. Many dangerous jobsite tasks are thus still routinely performed by humans, leading to thousands of workplace injuries and deaths annually.
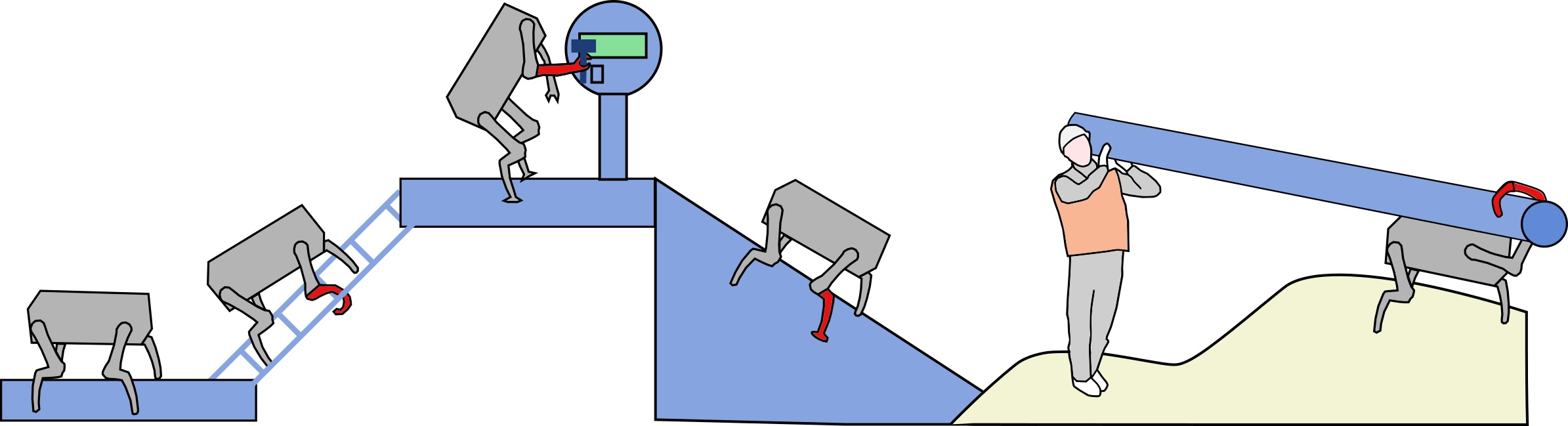
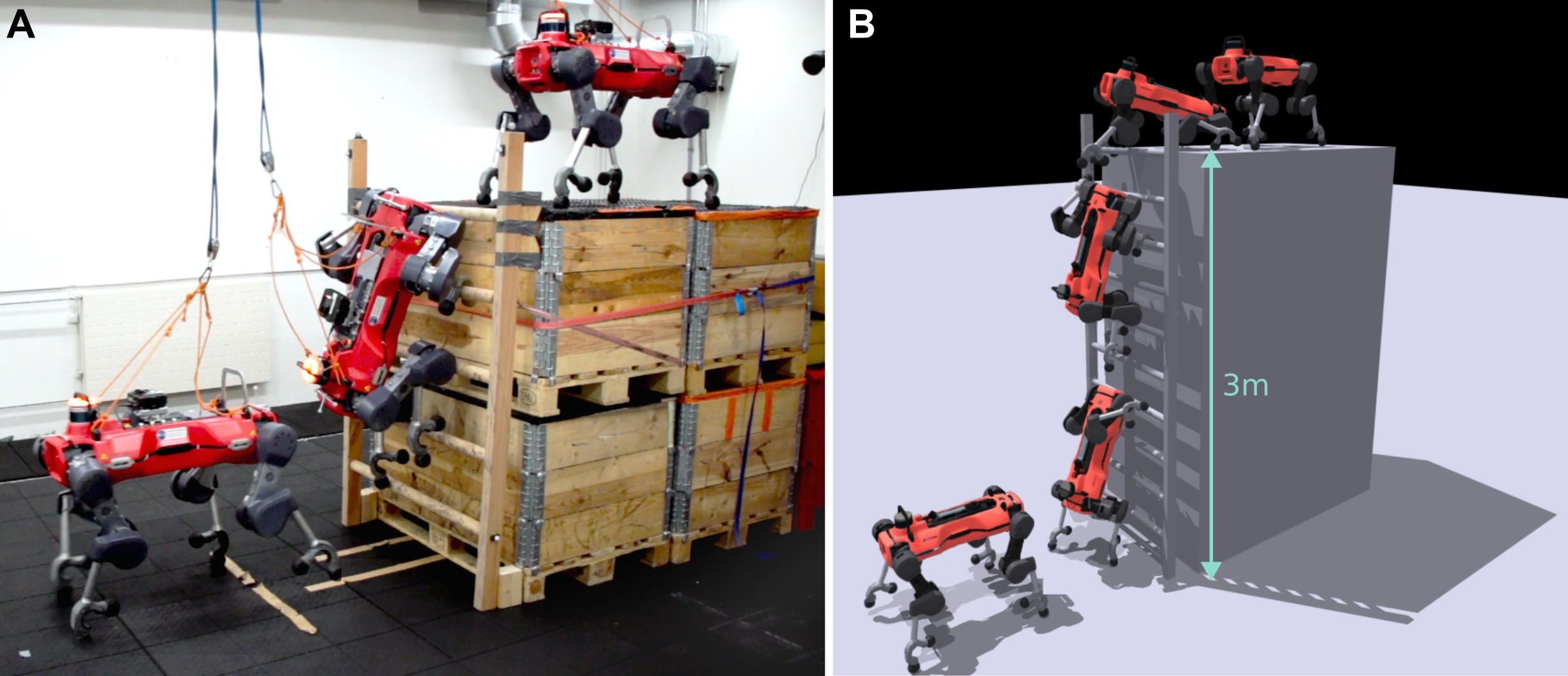
Robert Baines' research aims to replace traditional fixed legs with mechanisms that dynamically adjust shape and stiffness, enhancing interaction and dexterity without compromising agility. His team combines experiments and simulations to develop hardware and control systems that adapt limb shapes and behaviors for specific tasks. So far, they have demonstrated robust and rapid quadrupedal ladder climbing using hooked limbs and a reinforcement learning-derived control policy (Fig. 2; also external page see). In parallel, they have been developing morphing limb prototypes for diverse tasks.