Mobile Manipulation
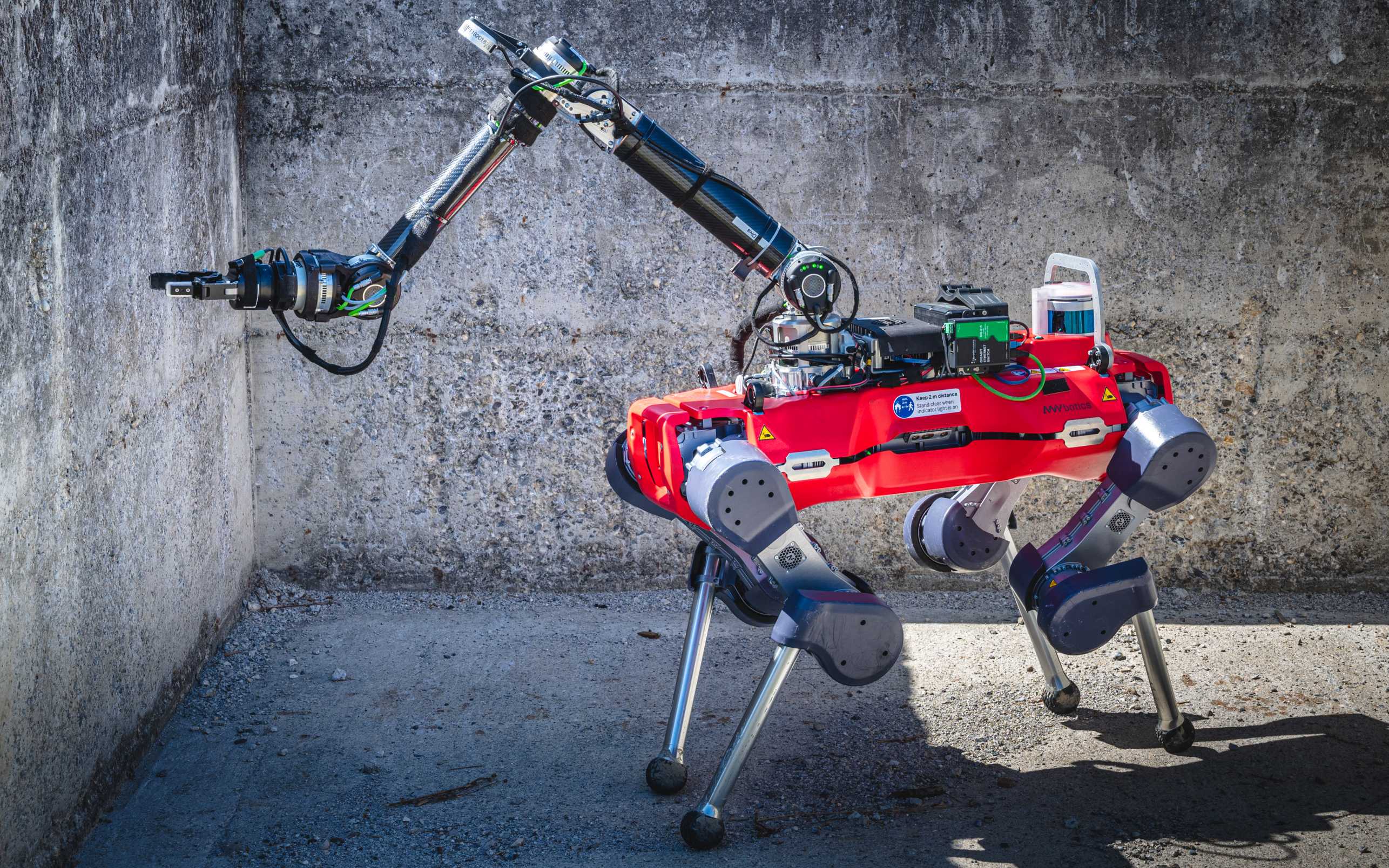
The ALMA (Articulated Locomotion and MAnipulation) Legged Manipulator Robot consists of the ANYmal quadruped robot, equipped with the DynaArm robot arm mounted on top. This configuration enables the robot to not only sense, perceive, and traverse unstructured environments through its array of onboard sensors and our custom robust locomotion controller, but also to directly interact with it using the manipulator arm.
Compared to robot arms used in other quadruped manipulators, the DynaArm, which we custom designed in-house, is unique in its powerful yet backdrivable joints. Its high torque enables manipulation of heavy objects as may be necessary for challenging field deployments, additionally to supporting its own weight during arm-assisted fall recovery. The backdrivability enables safe and compliant interactions with the environment, such as for human assistive applications, as well as direct human backdriving of the arm for use as a controller during leader-follower teleoperation.
Potential applications of this technology range from industrial inspection and maintenance, humanitarian disaster response, human assistive robotics, automated construction, and space exploration.