Focus Project
Students will develop and build a product from A-Z! They will be working in teams, where they learn how to structure problems and identify solutions to them, system analysis and simulation, as well as presentation and documentation techniques. They will build the product, with access to a Machine shop, and state of the art engineering tools (Matlab, Simulink, CAD, CAE, PDM).
2025 - 2026 : Project Equilibrio
The unicycle is a difficult vehicle to master, requiring accurate perception, high concentration as well as exceptional agility. It therefore presents itself as an interesting robotics problem to learn from and grow on.Apart from being a unique research platform, it can also perform motion impossible with legged and two-wheeled systems as for example turning on the spot. A linear leg will allow us to be even more agile and jump over obstacles.We will showcase these capabilities by driving down a mountain bike trail at the end of our project.
2024 - 2025 : Project Serenity
We are a team of 10 engineering students brought together through an ETH Focus Project. Our goal is to develop a highly resilient robot engineered for impact absorption and exploration in extreme environments. Designed to withstand impacts from significant heights, the robot will safeguard its onboard electronics and remain fully operational. Once on the ground, it will use an advanced jumping locomotion system, paired with Time-of-Flight cameras, to navigate and explore possibly unknown and challenging terrains with precision and reliability
Don't miss the roll-out on the 28.05.2025
2022 - 2023: Project Magnecko

The goal is to develop a legged robot capable of climbing any ferrous obstacle using Magnets as the method of adhesion.
Follow us on the website.
2021 - 2022: Project SpaceHopper
The challenging environment of asteroids calls for new, unique solutions. Our robot named SpaceHopper is a revolutionary, lightweight platform especially designed for low-gravity locomotion that could enable a broad range of new missions to explore this vast uncharted part of our solar neighborhood.
2020 - 2021: Project DYANA
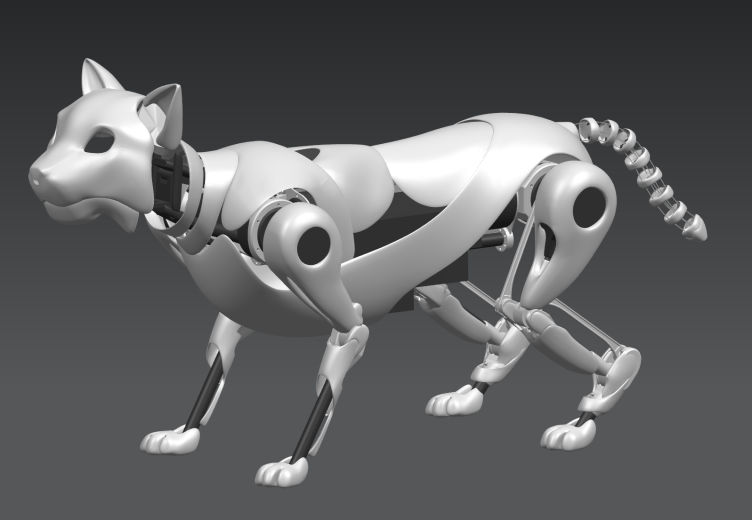
Our vision is to build a dynamic animatronic robot that bridges the gap between animatronics and mobile quadrupeds. By combining the world of realistic but fixed animatronics and mobile but technical robotics we aim to build a robot that brings our cat-like character to life.
2019 - 2020: Project Rowesys
Our mission is to provide a sustainable and herbicide-free solution for weed-control without burdening our farmers. To reach this goal, we are developing an autonomous weeding robot which uses vision recognition to identify and destroy weeds.
2018 - 2019: Project CHIRON

CHIRON:
CHIRON is a hydraulically actuated robotic arm which carries a set of interchangeable tools on its base, able to complete the process of cutting out ice-blocks and stacking them to build a wall on its own. CHIRON will participated in IGLUNA, an international student challenge hosted by the Swiss Space Center in collaboration with the European space agency (ESA).
2017 - 2018: Project Spacebok

Spacebok:
SpaceBok is redefining space exploration. Legged robotics with all its advantages can be used in space to improve the exploration of the Moon or Mars. In low gravity environments hopping proves to be energetically more efficient than walking.
Our aim is to build a jumping robot capable of overcoming large obstacles and thus increase the operation range of mobile robots for data collection.
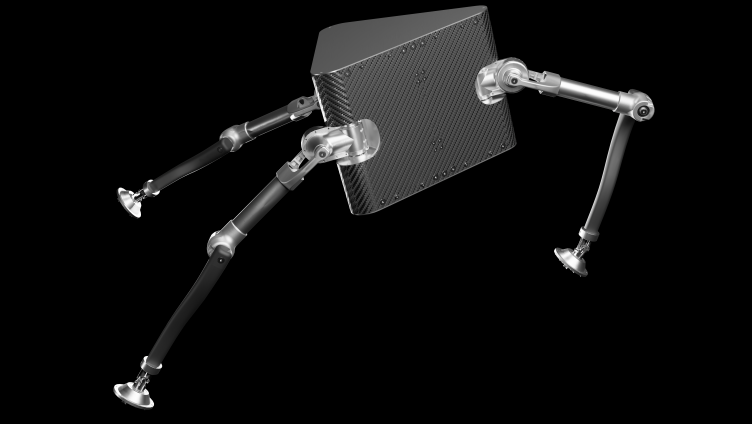
2016 - 2017: Project ATHLAS (Helicopter Landing Gear)

ATHLAS:
The project involves the development and verification of an adaptive landing gear for an unmanned helicopter (UAV). The prototype should demonstrate the advantages of an adaptive landing system and should be scalable for use on manned helicopters.
2015 - 2016: Project IBEX


