Legged Locomotion
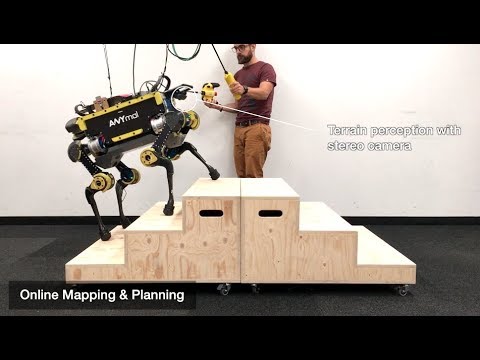
Legged robots can traverse on challenging terrain, to use perception to plan for footstep locations and to navigate in the environment, as well as to execute manipulation tasks. A legged system is an omnidirectional platform which can negotiate obstacles with a comparable size of the robot. Such unique mobility capabilities make these platforms a perfect candidate for scenarios such as search and rescue, inspection, and exploration tasks, which typically require machines capable of traversing challenging terrain and negotiating obstacles.
RSL is among the leading groups in the legged locomotion research. Our research in RSL focuses on all the aspects of the locomotion problem from hardware design to automated motion control and planning using proprioceptive and/or exteroceptive sensory information. Our quadrupedal platform, ANYmal, uses state-of-the-art force controlled actuation system and motion control framework.
A walking robot generates its motion by producing reaction forces between its legs and the terrain on which it is locomoting. Due to the hybrid nature of this platform, several challenges specific to legged locomotion arise when implementing the set of skills necessary to navigate in a real-world environment. One of the essential characteristics of a successful motion control structure is how fast it can recompute its solution. In RSL, we use optimization-based methods for both motion tracking and motion planning.
Hierarchical Motion Tracking
We have shown an implementation of a whole body motion tracking which finds the optimal joint accelerations and contact forces by solving a cascade of prioritized QP problems. This formulation is beneficial regarding computation speed and results in a more natural way of expressing the constraints of contact forces.

Motion Planning through Nonlinear Programming
In this branch of research, we use two different approaches, the task synergy approach, and the single task optimization.
Task synergy approach: This approach breaks the whole-body planning problem into CoM planning and foothold planning. The method relies on an online Zero Moment Point (ZMP) based motion planner which continuously updates the reference motion trajectory as a function of the contact schedule and the state of the robot. The reference footholds for each leg are obtained by solving a separate optimization problem.

Single task optimization: Unlike the previous approach, we use a single optimization formulation for legged locomotion that automatically determines the gait-sequence, step-timings, footholds, swing-leg motions and 6D body motion over non-flat terrain, without any additional modules. However, due to the high computational complexity of the problem, this approach runs in an offline fashion.

Model Predictive Control for Motion Planning
Our Model Predictive Control (MPC) is a single task optimization formulation for motion planning of legged system which is capable of running in a real-time fashion. In RSL, we use specialized optimal control solvers which leverage the numerical structure of the optimization problem in favor of reducing the computational burden. We have successfully used these state-of-the-art methods for real-time motion planning of the legged robots on hardware. We have further studied and extended this method to situations where the assumptions of rigid ground and perfect actuators are invalid. We address these real-world issues by adapting the cost function to be frequency-dependent. We show that motion plans generated with our frequency-aware MPC can be followed by the hardware more accurately than those generated with a standard baseline and enables locomotion on compliant terrain.

Articulated locomotion and Manipulation
Equipping a legged robot with an additional limb dedicated to manipulation tasks significantly extends the possible real-world deployment. The robot would be able to interact with its surroundings and other robots. This, however, comes at the cost of higher dimensionality of the problem. We use an optimization-based motion control and planning approach for ALMA (ANYmal equipped with a 6DoF robotic arm). The motion control of ALMA is capable of performing dynamic locomotion while executing manipulation tasks. The online motion planning framework, together with a whole-body controller based on a hierarchical optimization algorithm, enable the system to walk, trot and pace while executing tasks such as fixed-position end-effector control, reactive human-robot collaboration and torso posture optimization to increase the arm’s kinematic reachability.

Hybrid Locomotion: Exploiting the Advantages of Wheeled-Legged Robots
Traditional legged robots are capable of traversing challenging terrain, but lack of energy efficiency when compared to wheeled systems operating on flat environments. The combination of both locomotion domains overcomes the trade-off between mobility and efficiency. Therefore, we present a novel motion planner and controller which together enable a legged robot equipped with passive or powered wheels to perform hybrid locomotion, represented by an appropriate combination of driving and stepping maneuvers. The developed optimization framework tightly integrates the additional degrees of freedom introduced by the wheels. Our approach relies on a ZMP-based motion optimization which continuously updates reference trajectories. The reference motions are tracked by a hierarchical whole-body controller.
